Invented by Tabish Mustufa, Nicola Diolaiti, David Q. Larkin, Intuitive Surgical Operations Inc
These articulatable tools are designed to enhance the precision and accuracy of surgical procedures, allowing for more effective treatment and improved patient outcomes. By extending from a distal tip, these tools can reach areas that are difficult to access with traditional surgical instruments, providing surgeons with a better view and greater control during procedures.
One of the key advantages of these articulatable tools is their ability to navigate complex anatomical structures with ease. This is particularly beneficial in minimally invasive surgeries, where small incisions are made and the surgeon relies on a camera and specialized instruments to perform the procedure. With the help of these tools, surgeons can manipulate and maneuver with greater dexterity, reducing the risk of complications and improving overall surgical outcomes.
The market for medical robot systems providing articulatable tools is expected to witness significant growth in the coming years. The increasing demand for minimally invasive procedures, coupled with the rising prevalence of chronic diseases, is driving the adoption of these advanced technologies. Additionally, the growing geriatric population and the need for more precise and efficient surgical interventions are further fueling the market growth.
Several key players in the medical robot system market are actively involved in the development and commercialization of articulatable tools. These companies are investing heavily in research and development to enhance the capabilities of these tools and make them more user-friendly for surgeons. They are also focusing on improving the integration of these tools with existing robotic systems, allowing for seamless communication and coordination during surgical procedures.
However, there are certain challenges that need to be addressed for the widespread adoption of these articulatable tools. One of the main concerns is the high cost associated with these advanced technologies. The initial investment required for the purchase and maintenance of medical robot systems can be significant, limiting their accessibility to smaller healthcare facilities. Additionally, there is a need for comprehensive training programs to ensure that surgeons and medical professionals are proficient in using these tools effectively.
Despite these challenges, the market for medical robot systems providing articulatable tools is poised for substantial growth in the coming years. The potential benefits in terms of improved surgical outcomes, reduced complications, and enhanced patient care are driving the demand for these advanced technologies. As the healthcare industry continues to embrace innovation and technology, the market for medical robot systems is expected to witness further advancements, ultimately revolutionizing the way surgeries are performed.


The Intuitive Surgical Operations Inc invention works as follows
The processor may also be configured to display the optimal position on the display along with an image captured by the image capturing device of the working ends of the plurality medical instruments. The processor can also be configured to display the optimal position on the screen along with the image captured by an image capturing device of the working end of the plurality medical instruments.


Background for Medical robot system providing an auxiliary perspective of articulatable tools extending from a distal tip of an entry guide”.
Medical robotic systems, such as the teleoperative system used to perform minimally invasive surgery procedures, offer many advantages over traditional open surgical techniques. These include less pain, shorter stays in hospital, faster return to normal activity, minimal scarring and reduced recovery time. The demand for medical robotic systems like these is growing.
For certain medical procedures it may be beneficial to use only one entry aperture. This could include a minimally-invasive incision, or a natural orifice on the body, to enter the patient and perform a procedure. An entry guide, for example, can be placed, positioned and held in position in the entry aperture. Instruments, such as an articulated camera and a number of articulatable tools used in the medical procedure, can be inserted at the proximal end to extend from the distal end. The entry guide offers a single aperture to accommodate multiple instruments, while guiding them towards the worksite.
Since the entry guide is usually a small diameter to allow it to pass through a minimally-invasive incision or natural body orifices, there may be problems when teleoperating surgical tools and cameras to perform the procedure. The camera, for example, is restricted in its position relative to the tools. This limits its view.
The controllable links of the surgical instruments may inadvertently collide with each other (or with a link of the camera) during the performance of a medical procedure and, as a result, cause harm to the patient or otherwise adversely impact the performance of the medical procedure. The controllable links of the surgical instruments may collide inadvertently with each other or with a camera link during a medical procedure, causing harm to the patient.
Since the articulatable cameras are unable to view their own controllable links, the operator’s movement is a major concern when collisions with surgical tool links need to be avoided. When intuitive control is used to help the operator teleoperate the surgical tools and the camera, the movements of the linkages necessary to produce these intuitive motions may not be obvious to the user.
Accordingly one or more aspects are a method which provides an auxiliary viewpoint to an operator, to assist him in performing a surgical procedure on a person using a robotic medical system with articulatable tools extending from a distal tip of an entry guide that is inserted into a single aperture in the patient.
Another objective of one or more aspects is a method that can be implemented in a medical robot system to provide a visual indicator for an operator when the controllable links of the articulatable tools may collide.
Another objective of one or more aspects is a method that can be implemented in a robotic medical system and that gives a visual indicator to the operator when the joints, links or portions of them of the articulatable instrument are approaching an undesirable or desired event or condition.
Another objective of one or several aspects of the invention is to implement a method in such a robotic medical system that helps an operator better understand the configuration of linkages for the articulatable tools that are located outside the camera’s field of view.
The following claims summarize the embodiments and further objects of the invention.


Additional features, objects and benefits of the different aspects of the present invention will be apparent from the following description. This description should be viewed in conjunction with the accompanying illustrations.
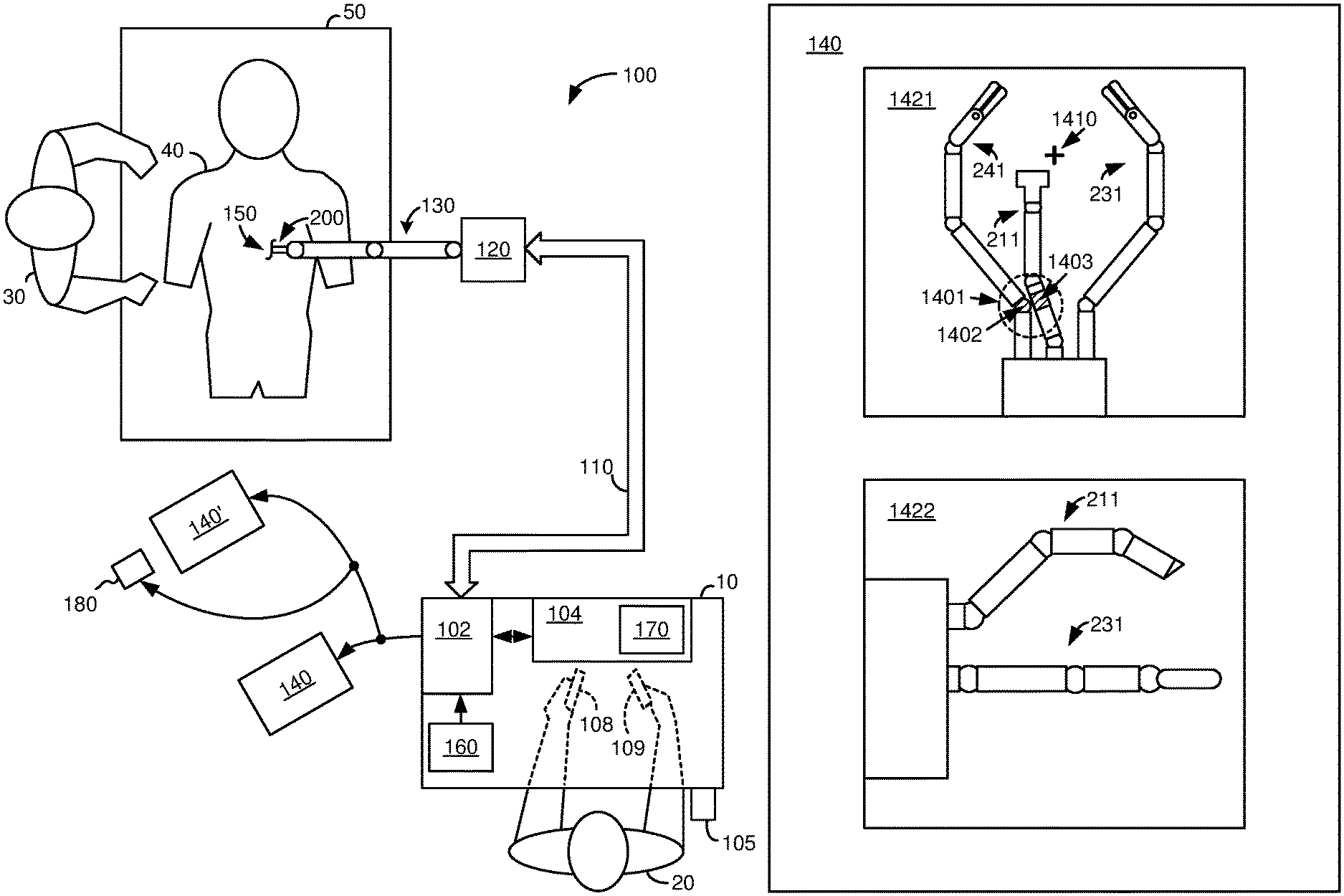
FIG. As an example, FIG. 1 shows a top-down view of an operation room where a surgeon 20 is using a medical robot system 100 to perform a surgical procedure on a patient 40, who is lying on his back on an operating table. The Assistant 30 can be placed near the Patient to help with the procedure, while the Surgeon 20 is performing the procedure by using input devices 108 and 109 on the surgeon console 10.
In the example presented, an entry guide 200 is inserted into the patient 40 through a single aperture of entry 150. In the present example, the entry aperture is a minimally-invasive incision, but in other medical procedures it could be a body orifice. A robotic arm assembly 130 mounted on a support is used to hold and manipulate the entry guide 200.
As with other parts of medical robotic system 100 in Figure 1, the robot arm assembly 130 has been simplified. 1 . In an example of a medical robotic system, the robotic assembly 130 includes both a setup hand and entry guide manipulator. The setup arm is utilized to properly position the entry guide at the aperture 150. The entry guide manipulator then robotically inserts and retracts the entry guide into and out the entry aperture 150. The entry guide manipulator can also be used for robotically pivoting the entry 200 in pitch roll and yaw around a pivot located at the entrance aperture 150. The entry guide manipulater 202 in FIG. is an example of one such entry guide manipulator. The entry guide manipulator 202 of FIG. 5 .
The console 10 comprises a 3-D display 104 that displays a 3-D view of the surgical site for the surgeon, input devices 108 and 109 which can be operated by either hand, and a controller (also called a processor herein). 102. Input devices 108 and 109 can include a wide range of input devices, such as joysticks or trigger-guns. They may also be hand-operated or other input devices. The Surgeon can also interact with the Medical Robotic System 100 using a foot pedal, a voice recognition system or GUI 170.
An auxiliary screen 140 is connected to the console 10 (and the processor 102) to provide auxiliary views for the surgeon to supplement the ones shown on the monitor 104″ Another auxiliary display 140? A second auxiliary display screen 140? A console 180 also includes an input device 180 that allows the Assistants to choose between the available auxiliary views to be displayed on the second auxiliary screen 140.
The console 10 is typically located in the same area as the patient so that the surgeon can monitor the procedure directly, be physically present if needed, and speak directly to the assistant(s) rather than using a telephone or another communication medium. The Surgeon may be in a separate room, building or another remote location. This allows for remote surgical procedures. In this case, console 10 can be connected to second auxiliary screen 140. The console 10 can be connected to the second auxiliary display screen 140 through a network such as a wide area network or Internet.
As shown in Figures 3-4, the entry guide 200 has articulatable instruments such as articulatable surgical tools 231, 241 and an articulatable stereo camera 211 extending out of its distal end. The entry guide 200 is equipped with articulatable tools such as articulatable surgery tools 231,241 and an articulated stereo camera 211 that extend from its distal end. The entry guide 200 can guide other tools if necessary to perform a medical procedure on a patient’s worksite. As shown in FIG. A passage 351, shown in FIG. 4, is provided for extending a second articulatable tool through the guide 200 to its distal end. In a tool-following mode, each of the surgical instruments 231, 241 are associated with the respective input device 108,109. The surgeon performs a surgical procedure by manipulating input devices 108 and 109, so that the controller 102 moves their respective surgical tools 231,241 in a tool following mode. Meanwhile, the surgeon views the worksite on the console monitors 104 while images are captured by the articulatable cameras 211.
The input devices should have the same degree of freedom as the associated tools to give the surgeon the feeling of telepresence. This gives the surgeon the impression that they are directly controlling the tools. The monitor 104 will also be positioned close to the surgeon’s hands in order to display a projected picture that is oriented such that the Surgeon can feel as though he is looking down directly onto the worksite and the images of the tools 241, 231 appear near where the Surgeon is located.
In addition, the image displayed on the monitor 104 can be projected as a perspective view so that the surgeon can manipulate the end-effectors 331 and 341 of the tool 231, 241 using their respective input devices 108 and 109, just like he was actually at the site. True presence is the display of an image that simulates the perspective of an operator who is physically manipulating end effectors 331, 341. The processor 102 can transform the coordinates for the end effects 331, 341, into a perceived location so that the perspective picture being shown on monitor 104 is what the surgeon would see if he was directly behind the end effects 331, 341.


Click here to view the patent on Google Patents.







